Flight of the Valkyrie
Waterloo engineering students compete for glory with an AI-enhanced urban firefighting drone.

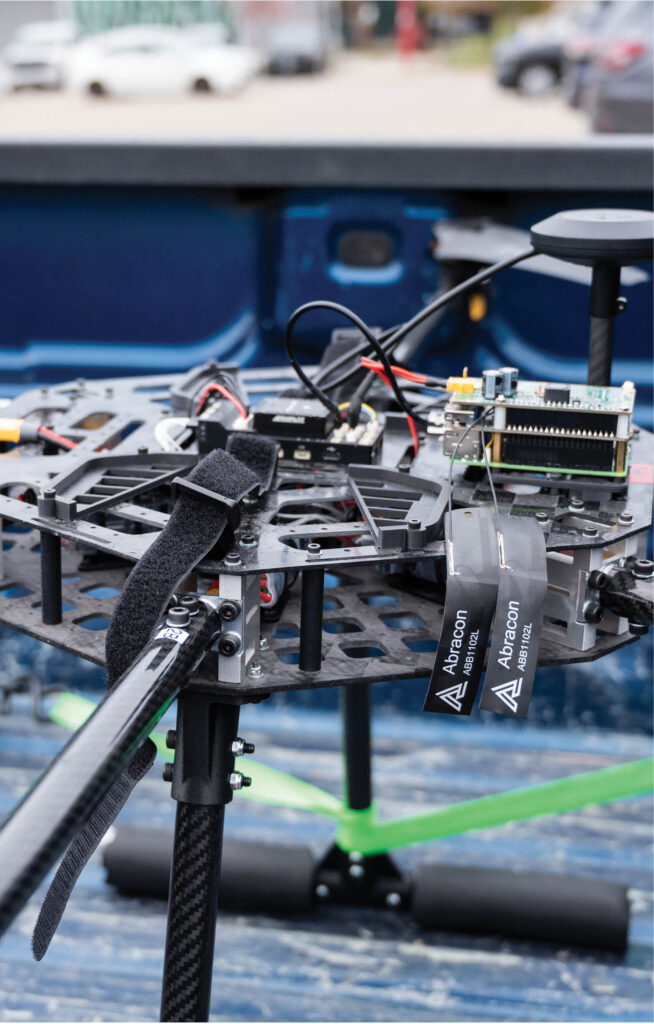
Engineering students in the Waterloo Aerial Robotics Group (WARG) are gearing up to defend their title as champions of the National Student Unmanned Aircraft Competition, hosted annually by the Aerial Evolution Association of Canada.
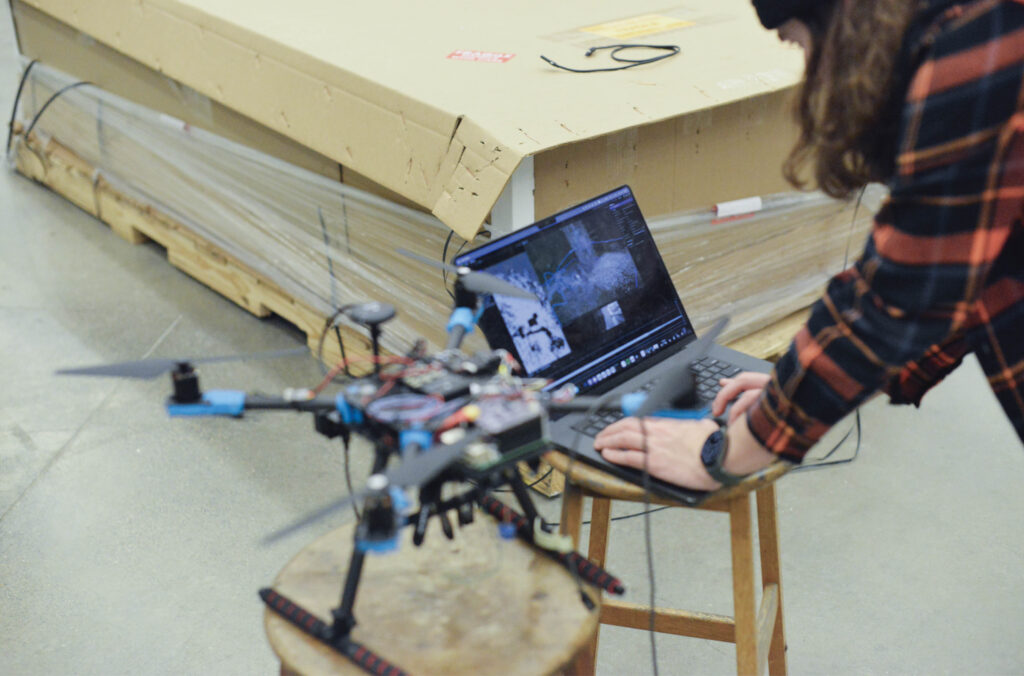
The challenge? To build an AI-enhanced drone for urban firefighting and fly it in competition against other student-built drones. In addition to carrying water and flying outdoors, the drone must also be able to navigate through an indoor concrete structure. This is where the AI component comes in: to find its way through the indoor space without relying on GPS data, and to hold its position while hovering inside that space, the drone must be able to create a map of the indoors in real time.
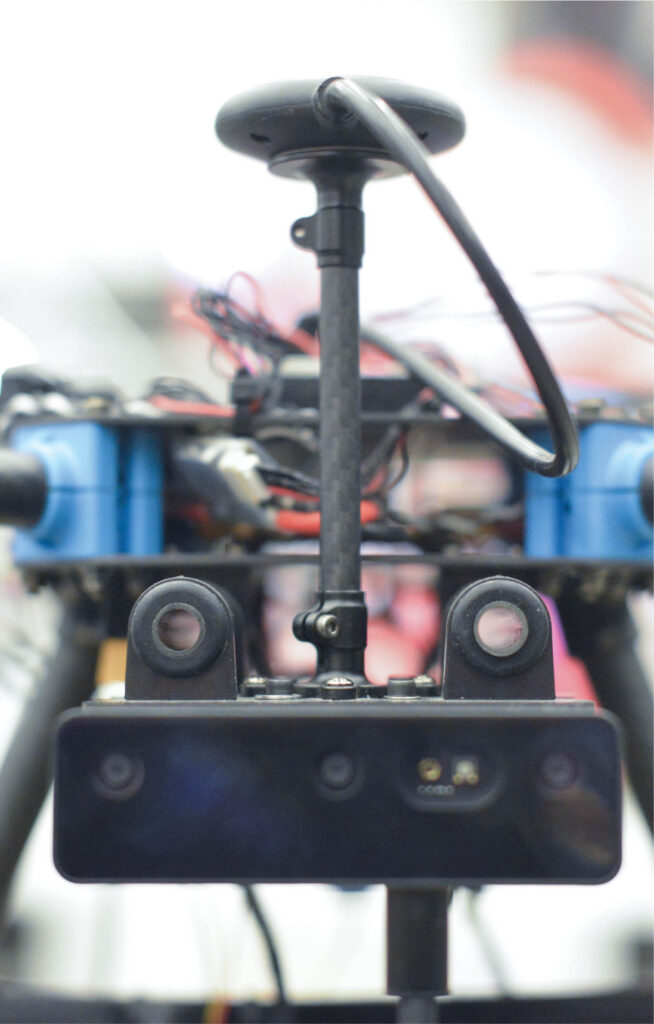
WARG’s team of approximately 30 students will accomplish this by equipping the drone with a stereo camera (ie: a camera with two lenses) that allows it to compute 3D space by comparing the images from the two lenses. “At the highest level, we are looking at fusing stereo camera data with the flight controller data and using it to hold position in absence of a GPS,” explains WARG technical director Manasva Katyal.
The competition takes place in Ottawa May 22 to 24.











More from Features
-

Degrees of Change
British Columbia’s funding pressures, shifting enrolment and policy reforms signal sweeping changes ahead for colleges and universities across the province.
-

Behind the curve
Learning to embed AI in the medical curriculum.
-
The grey area of artificial intelligence
As AI transforms university practices, legal and ethical challenges are multiplying.
-

The King and AI
A team of international scholars tackles a historical work of epic proportions.
More from Artificial intelligence
-

The Human Algorithm
As artificial intelligence reshapes the workplace, the most valuable skills aren't technical — they're fundamentally human.
-

The tyranny of the average
Driven by statistics, AI homogenizes humanity and devalues outliers.
-

Adopting AI is a social contract
Integrating artificial intelligence into our societies and personal lives binds us to certain futures and forecloses the possibility of others. Are we ready to accept the consequences?
-

Teaching in the age of AI shortcuts
Students will use AI. Here’s what it takes to ensure it strengthens their thinking instead of replacing it.
More from Feature articles
-

Wags over worries
A look at how campuses across Canada use pet therapy programs to support students’ mental health.
-

Top 10 movies about university life
In honour of Academy Awards season, here’s our list of the best films about professors, students and out-of-control frat boys.
-

Reaffirming the role of universities
Lessons from the U.S.
-

Are universities ready for cyberattacks?
Canadian universities stand in the crosshairs of cybercriminals: Q&A with Benoît Dupont, Canada Research Chair in Cyber-resilience.
Post a comment
University Affairs moderates all comments according to the following guidelines. If approved, comments generally appear within one business day. We may republish particularly insightful remarks in our print edition or elsewhere.